Как устроен промышленный робот? Краткий гид по структуре и движениям робота
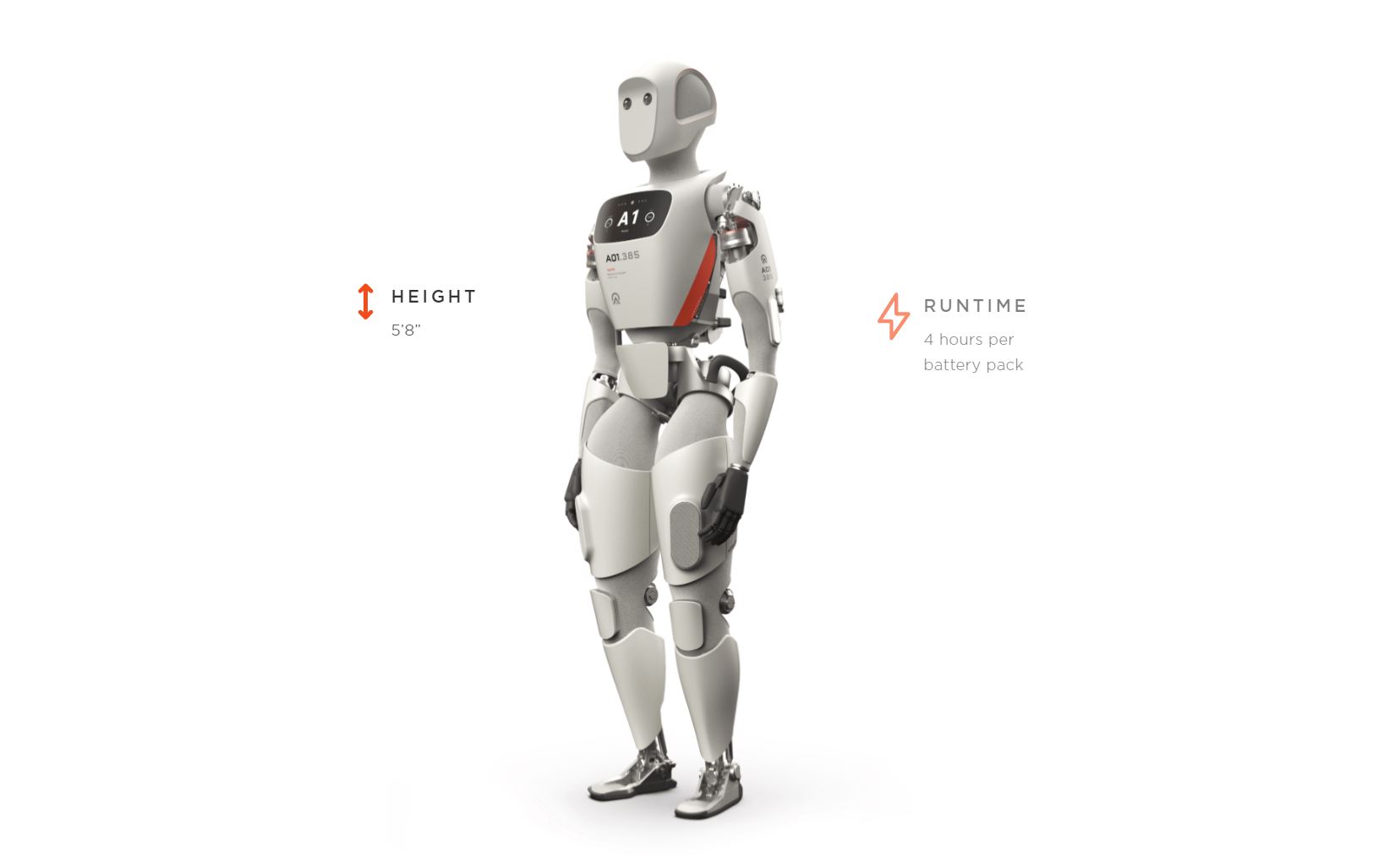
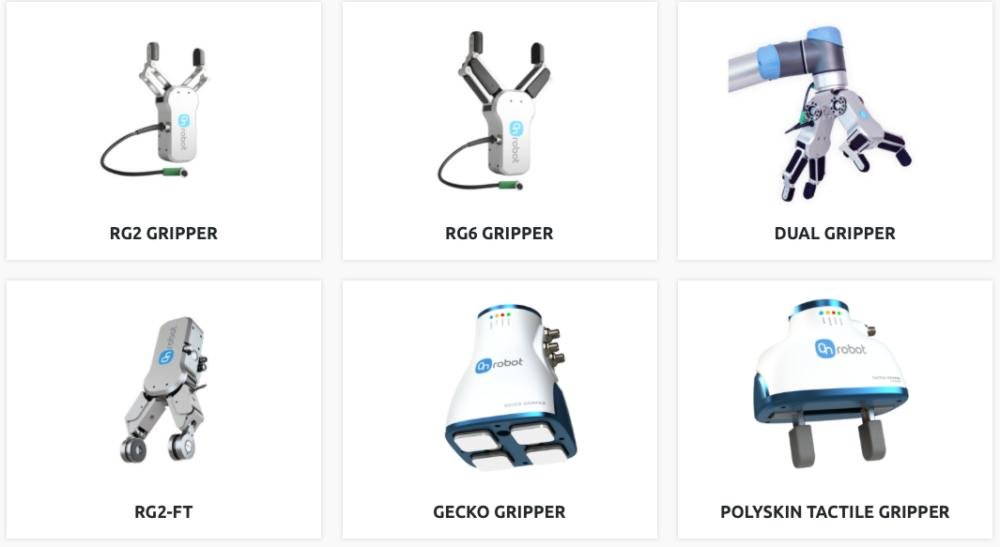
Рука манипулятор для человекоподобного робота RKP-RHD позволяет производить захват предметов по принципу пятипалой человеческой руки с дальнейшим их удержанием, перемещением в пространстве относительно любой плоскости или переносом. Также возможно использование сжатого в кулак манипулятора RKP-RHD для динамического воздействия на внезапно возникшее впереди или сбоку препятствие или на соперника в боях роботов. Роботом называют автоматическое устройство, имеющее манипулятор — механический аналог человеческой руки — и систему управления этим манипулятором. Обе эти составные части могут иметь различное устройство — от очень простого до чрезвычайно сложного. Манипулятор обычно состоит из шарнирно соединенных звеньев, как рука человека состоит из костей, связанных суставами, и заканчивается охватом, который является чем-то вроде кисти человеческой руки.














Роботизированные руки оснащены множеством деталей и должны свободно вращаться по осям. Важно подобрать для них надежный привод, который способствовал бы их движению с нужным типом и величиной силы. Роботы-манипуляторы часто выполняют не только рутинные задачи, но и поручения в опасных или сложных условиях, как и человек, поэтому двигатель должен идеально подходить под все требования. Ассортимент на рынке огромен, и у каждого мотора постоянного тока, степпера и сервопривода есть как свои преимущества, так и недостатки.







Ваше сообщение должно содержать от 20 до символов! Пожалуйста, проверьте свою электронную почту! Мы скоро тебе перезвоним!